- Veröffentlichungsdatum : 19.10.2022
- – Letztes Update : 18.10.2022
- 9 Min -
- 1819 Wörter
- - 9 Bilder
TOM - Wie von Geisterhand

Die Automatisierung auf dem Gefechtsfeld wird den Soldaten künftig schwere Arbeiten erleichtern. Das betrifft auch die Munitionsversorgung. Die Heereslogistikschule präsentierte in Zusammenarbeit mit zivilen Forschungseinrichtungen das Projekt "TOM", das mit selbstfahrenden Staplern die Munition zum Schützen liefert.
Um Munition auf dem letzten Kilometer vom Versorgungsverteilungspunkt (VVP) zum Schützen zu transportieren, werden entweder geländegängige Fahrzeuge (ungehärtet oder gehärtet) oder Soldaten zu Fuß eingesetzt. Daraus resultieren Probleme. Einerseits stellen die Transport- und Versorgungstätigkeiten aufgrund des Gewichtes der Versorgungsgüter eine hohe körperliche Belastung des Personals dar. Andererseits gelten Versorgungsfahrzeuge als Primärziele der gegnerischen Konfliktpartei, da sie nicht über den gleichen Schutz wie Gefechtsfahrzeuge verfügen. Der Einsatz von Personen auf den letzten Kilometern (ab der Ebene Einheit bis zum Bedarfsträger) ist daher mit einem erhöhten Risiko behaftet. Um diese Gefahr zu minimieren, hat das Bundesheer in Zusammenarbeit mit der Fraunhofer Austria Research GmbH als Konsortialführer, dem Austrian Institute of Technology, der Firma Palfinger sowie dem Fraunhofer Institut für Optronik, Systemtechnik und Bildauswertung im Projekt „TOM“ nun ermittelt, wie der Munitionstransport zur Versorgung der Schützen mittels eines fahrerlosen Transportsystems funktionieren kann. Der Projektname „TOM“ steht dabei für „tele-operated-ammunition-handling“.
Das Ergebnis des Projektes ist ein Demonstrator für ein teleoperierendes und geografisch flexibel einsetzbares, energieautarkes Verkehrssystem. Der Einsatz solcher unbemannter teil- bzw. vollautonomer Landfahrzeuge soll das Personal entlasten und seine Sicherheit sowie die Leistungsfähigkeit am Einsatzort erhöhen. So kann das Projekt einen wesentlichen Beitrag zur Stärkung der Versorgungsprozesse und Sicherheit der logistischen und militärischen Kräfte leisten. Der Demonstrator wurde zum Abschluss des Projektes auf dem Gelände der Heereslogistikschule in Wien vorgestellt.
Neben der Entwicklung eines energieautarken militärischen Verkehrskonzeptes stand ein weiteres zentrales Anliegen des Forschungsprojektes „TOM“ im Fokus, nämlich ein Pflichtenheft zu erstellen. Dieses bildet die Grundlage, ein oder mehrere Fahrzeuge mit den für den militärischen Einsatz beim Bundesheer geforderten Eigenschaften in Auftrag geben zu können.
Ablauf der Versorgung
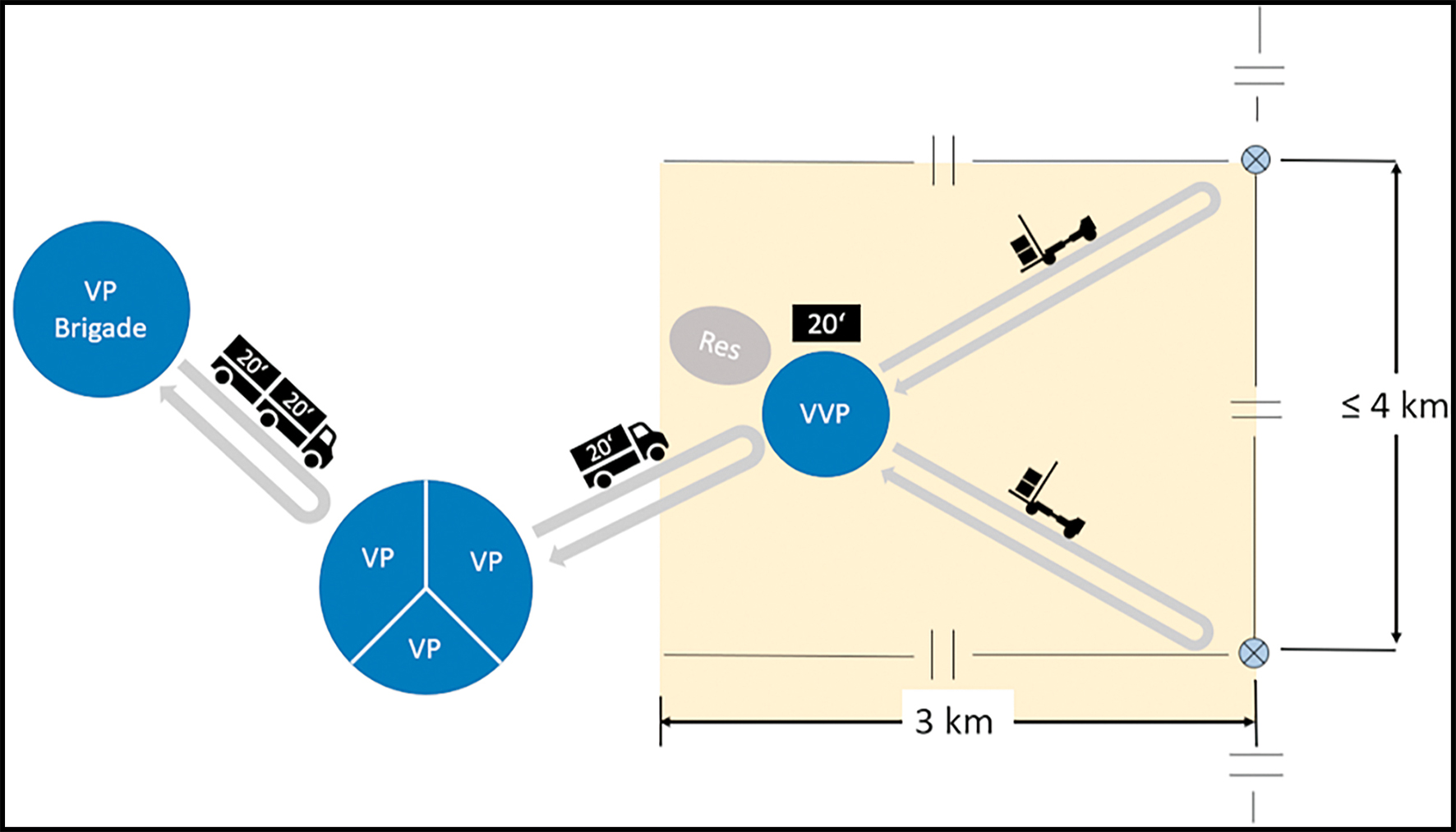
Will man die Prozesse und die Abläufe optimieren, ist es zuallererst notwendig, den Status quo und sämtliche Erfordernisse und Bedingungen genau zu kennen. Die Forscher des Projektes „TOM“ haben daher im ersten Schritt eine Prozessaufnahme der Ist-Transportkette durchgeführt und die Transportgüter und die bestehenden Transportsysteme analysiert. Um die Truppen zu versorgen, wurde eine logistische Basis am Einsatzort – ein Versorgungspunkt (VP) je Bataillon und ein Versorgungsverteilungspunkt (VVP) je Kompanie – eingerichtet. Die benötigte Munition wird auf EURO- und Sonderpaletten kommissioniert und in Standard- 20-Fuß-Containern zu den VVP geliefert.
Vorgaben
Aus dem evaluierten Ablauf der Versorgung ergaben sich bereits die ersten konkreten Voraussetzungen, die das Fahrzeug erfüllen muss: Das Projektteam definierte auf Basis der typischen Transportstrecke die erforderliche Mindestreichweite. Zudem wurde die maximale Dauer des Versorgungszyklus festgelegt, woraus die Mindestgeschwindigkeit errechnet werden konnte. Daraus konnten weitere Überlegungen – wie die erforderlichen Inhalte des Kraftstofftanks und die Möglichkeit der Betankung des Verkehrssystems auf dem Versorgungspunkt – abgeleitet werden. Überlegungen zur Geländegängigkeit führten dazu, dass ein Allrad-Antrieb ausgewählt wurde.
Eine weitere Grundvoraussetzung ist, dass der VVP so ausgelegt ist, dass das Fahrzeug problemlos in den und aus dem Container fahren kann. Daraus ergab sich die Notwendigkeit von Gurtbandantrieben. Wartungs-, Instandhaltungs- und Reparaturarbeiten am Fahrzeug machen es zudem erforderlich, am VP eine vollausgestattete Werkstatt zu implementieren.
Das autonome Fahrzeug
Um das autonome Fahren zu ermöglichen, ist das Vehikel mit zahlreichen Sensoren ausgestattet. Ein Teil dieser Sensoren eignet sich zur Erfassung von Hindernissen, die sich rund um das Verkehrssystem sowie auf seiner Route befinden. Werden überwindbare Hindernisse (z. B. Äste, kleinere Steine, aber auch Schlaglöcher und Pfützen) erkannt, werden diese be- bzw. überfahren. Befinden sich auf der Route des Verkehrssystems Hindernisse, die nicht überfahren werden können, werden diese ebenfalls von den Sensoren erfasst. In ländlichen Gebieten können das beispielsweise Felsen oder umgestürzte Bäume sein, in urbanen Räumen muss unter anderem mit Menschen oder Trümmern von Gebäuden gerechnet werden.
Ist ein Umfahren der Hindernisse in unmittelbarer Umgebung möglich, umfährt das Verkehrssystem die Hindernisse autonom und setzt seine Fahrt danach auf der geplanten Route fort. Falls die Route des Verkehrssystems versperrt ist und keine Ersatzroute in unmittelbarer Umgebung gefunden werden kann, bleibt das Fahrzeug selbsttätig stehen und sendet ein Signal an den Leitstand. Im Leitstand kann dann bezüglich der weiteren Vorgehensweise entschieden werden. Beispielsweise kann das Verkehrssystem zum Container zurückgeholt oder es kann über eine teleoperierte Steuerung versucht werden, die Hindernisse zu umfahren. Eine weitere Option ist der Einsatz von Räumkräften zur Entfernung der Hindernisse. Doch nicht nur zum Finden neuer Routen, sondern auch auf den letzten Metern muss der Teleoperateur mittels Funk-Fernsteuerung die Steuerung des Fahrzeuges vornehmen.
Das ferngesteuerte Fahrzeug
Beim autonomen Fahren sind Richtungsabweichungen von etwa einem Grad möglich. Im freien Gelände stellt dies kein Problem dar – innerhalb eines engen Containers wäre diese Abweichung allerdings bereits zu groß, zumal links und rechts des Fahrzeuges nur wenige Zentimeter Spielraum zur Containerwand zur Verfügung stehen. Hier wird eine ruhige Hand gebraucht und deshalb wird auf manuelle Steuerung umgeschaltet. Von seinem Leitstand aus – entweder mobil in einem Fahrzeug oder auch stationär eingerichtet – steuert der Teleoperateur das Fahrzeug mittels Joysticks zur Palette und überwacht den Prozess auf Monitoren. Nach Bestätigung der erfolgten Lieferung durch den Empfänger kehrt das Verkehrssystem im Automatik-Modus wieder zum VVP zurück.
Sandsturm, Schneegestöber und Dauerregen
Dem Projekt lagen klar definierte Zielvorgaben zu den Einsatzorten und Umfeldbedingungen zugrunde. Die Einsatzfähigkeit des Verkehrssystems im Radius von zumindest 6 000 km um Österreich war eine der konkreten Forderungen. In diesem Umkreis muss das Fahrzeug in verschiedenen Arten von Gelände, in unterschiedlichen Klimazonen und auf unterschiedlichen Untergründen funktionieren; in der Wüste bei Sandstürmen genauso wie auf der Staumauer eines alpinen Wasserkraftwerkes im Schneegestöber. Insgesamt wurden für das Transportsystem 107 relevante militärgeografische Faktoren identifiziert.
Vier Einsatzcluster wurden für das Verkehrssystem definiert: Diese umfassen neben urbanen Zonen und Landschaften aus Wald, Wiese und Sumpf auch unterschiedliche Wüstenarten und alpines Gelände mit Eis und Gebirge. Im urbanen Gebiet wurde speziell auf den Städte- bzw. Häuserkampf und dessen Anforderungen auf das Transportsystem eingegangen. Vor allem der Schutz und die statische Verteidigung von kritischer Infrastruktur wie Kraftwerken, Krankenhäusern, Regierungssitzen oder von Kasernen wurden in Betracht gezogen. Auslandseinsatzgebiete des Bundesheeres wie die Westsahara oder der Nahe Osten sind Wüstengebiete. Um das Transportsystem auch in diesen Einsatzräumen effizient und vollumfänglich einsetzen zu können, wurde den besonderen Anforderungen bei Sandsturm oder Hitze Rechnung getragen.
Um sich bei besonderen Umfeldbedingungen auf Wiesen, in Wäldern oder Sümpfen bewähren zu können, muss das Fahrzeug bei Nässe, hoher Luftfeuchtigkeit und auf schlammigem Untergrund und gegebenenfalls auch bei Dauerregen funktionieren. Diese Umstände wurden ebenfalls berücksichtigt, genauso wie tiefe Temperaturen mit Schneefall und Eis im Gebirge. Alle Staaten, die sich im definierten Umkreis von 6 000 km um Österreich befinden, sind den Einsatzclustern zugeordnet worden. Abschließend sind je Cluster technische und militärische Anforderungen an das Transportsystem abgeleitet worden.


Was kann das Fahrzeug?
Folgende technische Anforderungen waren zu erfüllen: Beim Durchqueren von Pfützen oder dem Befahren von schlammigem Untergrund, flachen Gewässern oder Ähnlichem darf das Fahrzeug nicht beschädigt werden. Das problemlose Durchfahren einer gewissen Gewässertiefe (Wattiefe) muss vorausgesetzt werden. Fahrbahnbreiten, Unebenheiten in der Fahrbahn, weiche Untergründe und kleinere Hindernisse dürfen keine negativen Auswirkungen auf das Fahrverhalten des Fahrzeuges haben. Der Offroad-Einsatz muss gegeben sein, weshalb Gurtbandlaufwerke als Antrieb ausgewählt wurden. Diese gewährleisten auch das Einfahren des Verkehrssystems in den Container ohne Hilfsmittel.
Das Fahrzeug muss sich in Gebieten abseits von Fahrwegen auf weichem, wenig griffigen Untergründen bewegen und dabei Hindernisse sowie Steigungen von bis zu 30 Prozent bewältigen können. Darüber hinaus muss ein problemloser, zuverlässiger Einsatz bei Seehöhen von bis zu
3 200 Metern und in einem Temperaturbereich von minus 25 bis plus 49 Grad Celsius sichergestellt werden. Hinsichtlich der Transportgüter muss das Fahrzeug in der Lage sein, sowohl Paletten mit genormten Abmessungen (z. B. Europaletten) als auch Sonderpaletten aufzunehmen und zu transportieren.
Bei der Definition dieser technischen und militärischen Ausstattung des Verkehrssystems zeigte sich, dass die spezifischen Anforderungen meist mit der Basisversion des Palfinger Craylers – ergänzt durch geeignete Sensorik für den Automatik- und Teleoperationsbetrieb – übereinstimmen. Dadurch ergibt sich ein wesentlicher Vorteil, zumal sich einige dieser Fahrzeuge bereits im Besitz des Bundesheeres befinden. So wird durch den hier gewählten Ansatz die Möglichkeit der modularen Erweiterung bestehender Basissysteme geschaffen. Dadurch können Synergieeffekte erzielt werden. Zum Beispiel sind die potenziellen Bediener bereits geschult und das Wartungskonzept der Basisvariante ist bekannt.
Einsatzszenarien
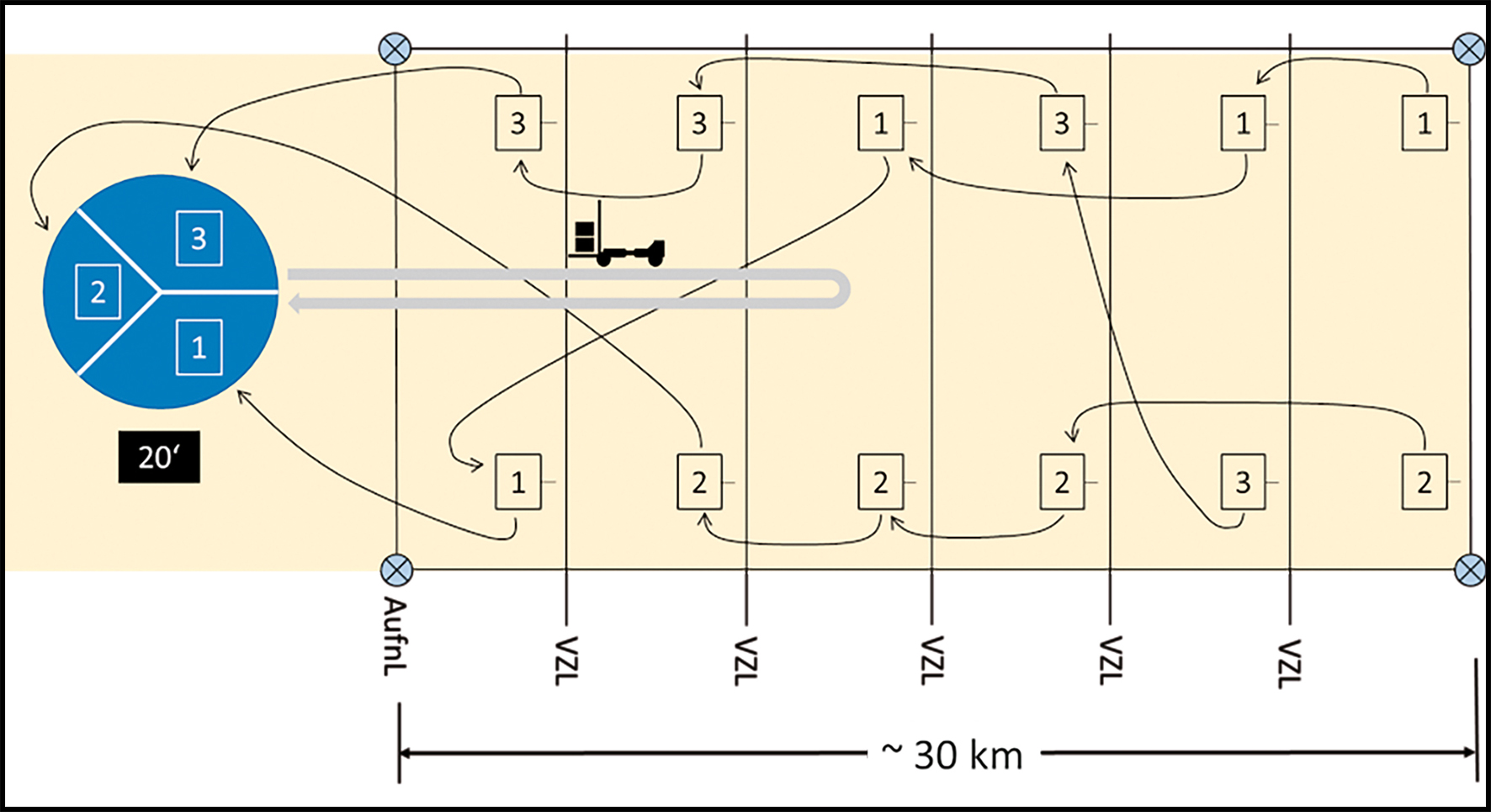
Mögliche Einsatzszenarien des Fahrzeuges sind Schutz- sowie Abwehroperationen, der Einsatz im urbanen Gebiet und die Verzögerung. In all diesen Operationen soll das autonome Fahrzeug die Truppen mit Munitionsnachschub versorgen. Eine Besonderheit der Verzögerung ist der weite Einsatzbereich von etwa 30 Kilometern, über den sich die zu versorgende Truppe mit einer gewissen Geschwindigkeit zurückzieht. Das Verkehrssystem sollte daher das geforderte Tempo leisten können.

Praktische Studie
Zur praktischen Evaluierung des Verkehrssystems wurde eine Fallstudie an der Heereslogistikschule erstellt. Zur Präsentation der Ergebnisse waren auch Gäste geladen, die mitverfolgen konnten, wie zwei unterschiedliche Szenarien simuliert wurden. In der Vorbereitungsphase lernte das Verkehrssystem im Zuge einer Teaching-Fahrt die finale Einsatzumgebung kennen und nutzte diese Daten für die darauffolgende autonome Fahrt. Der Leitstand dafür wurde im Obergeschoss eines Gebäudes in der Vega-Payer-Weyprecht-Kaserne eingerichtet.
Die beiden Szenarien waren mit dem Überwinden einer unterschiedlichen Distanz verbunden: Beim Einsatzszenario A wurde die Palette teleoperiert im Container aufgenommen. Danach wurde auf den autonomen Betrieb des Fahrzeuges umgeschaltet. Anschließend wurde die Palette vom Container direkt zur Entladestation befördert und dort abgeladen. Danach erfolgte die Retourfahrt zum Container. Die zurückgelegte Distanz je Richtung für dieses Szenario betrug etwa 100 Meter.
Im Einsatzszenario B wurde das Fahrzeug zu Beginn ebenfalls durch Teleoperation aus dem Leitstand in den Container navigiert, wo die Palette teleoperiert aufgenommen wurde. Danach wurde die Palette im autonomen Betrieb zum Entladeort transportiert und dort abgegeben. Der wesentliche Unterschied zu Einsatzszenario A lag darin, dass ein Hindernis umfahren werden musste, das von der Aufklärung gemeldet wurde. Aus Sicherheitsgründen wurde das Hindernis nicht in physischer Form ins Szenario integriert, sondern virtuell implementiert. Das Fahrzeug musste aufgrund des unerwarteten Hindernisses auf der Strecke zum Entladepunkt eine Alternativroute berechnen. Die zurückgelegte Distanz je Richtung für dieses Szenario betrug etwa 250 Meter.
Das Verkehrssystem konnte an der Heereslogistikschule alle militärischen, technischen und logistischen Anforderungen erfüllen. Sämtliche automatisierten Transporte während der Vorbereitung sowie bei der Fallstudie selbst wurden fehlerfrei und effizient durchgeführt. Die Einfahrt und die Ausfahrt aus dem 20-Fuß-Container sowie die Aufnahme und die Abgabe der Munitionspaletten wurden ebenfalls teleoperiert problemlos durchgeführt.
Mögliche weitere Entwicklungsschritte
Mit dem aktuellen Stand der Technik ist noch keine vollständige Automatisierung der gesamten Transportkette möglich. An den Schnittstellen, zum Beispiel beim Öffnen des Containers oder beim Entfernen der Ladungssicherung, sind weiterhin manuelle Tätigkeiten nötig. Hier kann man in Zukunft ansetzen und in weiteren Entwicklungsschritten Systeme zur automatischen Ladungssicherung und -entsicherung konzipieren.
Eine weitere Zukunftsvision des autonomen Fahrzeuges ist die Fähigkeit, großräumige Hindernisse ohne den operativen Eingriff durch den Menschen über die Remote-Control-Leitsteuerung zu bewältigen. Hier könnte künftig eine Drohne eingesetzt werden, um alternative Routen zu finden.
Die Vision des Bundesheeres ist ein (semi)autonomer Konvoi für den Munitionstransport. Das Forschungsprojekt „TOM“ ist mit weiteren Projekten der Förderung für die österreichische Verteidigungsforschung in diese Vision integriert.
DI Christoph Ecker; Projektleiter für autonome Transportsysteme.