
- Veröffentlichungsdatum : 11.04.2019
- – Letztes Update : 10.04.2019
- 8 Min -
- 1505 Wörter
- - 12 Bilder
GPS, Galileo und Satellitennavigation Teil 1
Die aktuellen Anwendungsmöglichkeiten von Satellitennavigation im Bereich Positionierung, Navigation und Zeit, auf Englisch Position - Navigation - Timing (PNT), reichen von allgemeiner Logistik/Transport/Navigation über Kommunikation, Versorgungsnetze bis hin zum Zeitstempel bei Finanztransaktionen.
In dieser positiven Aufwärtsspirale zwischen Nutzanwendungen, Industrieentwicklungen, Marktsegment, nationalem Prestige, Autarkie bei Schlüsseltechnologien und militärischen Notwendigkeiten für robuste PNT-Dienste kam und kommt es zu einer beeindruckenden Entwicklung und Inbetriebnahme von weiteren (nicht-US) Satellitennavigationssystemen. Neben dem seit Jahrzehnten global funktionierendem GPS existiert seit dem „Kalten Krieg“ auch das russische GLONASS sowie in Fertigstellung sowohl das chinesische BEIDOU als auch das europäische Galileo (siehe Abb. 1)
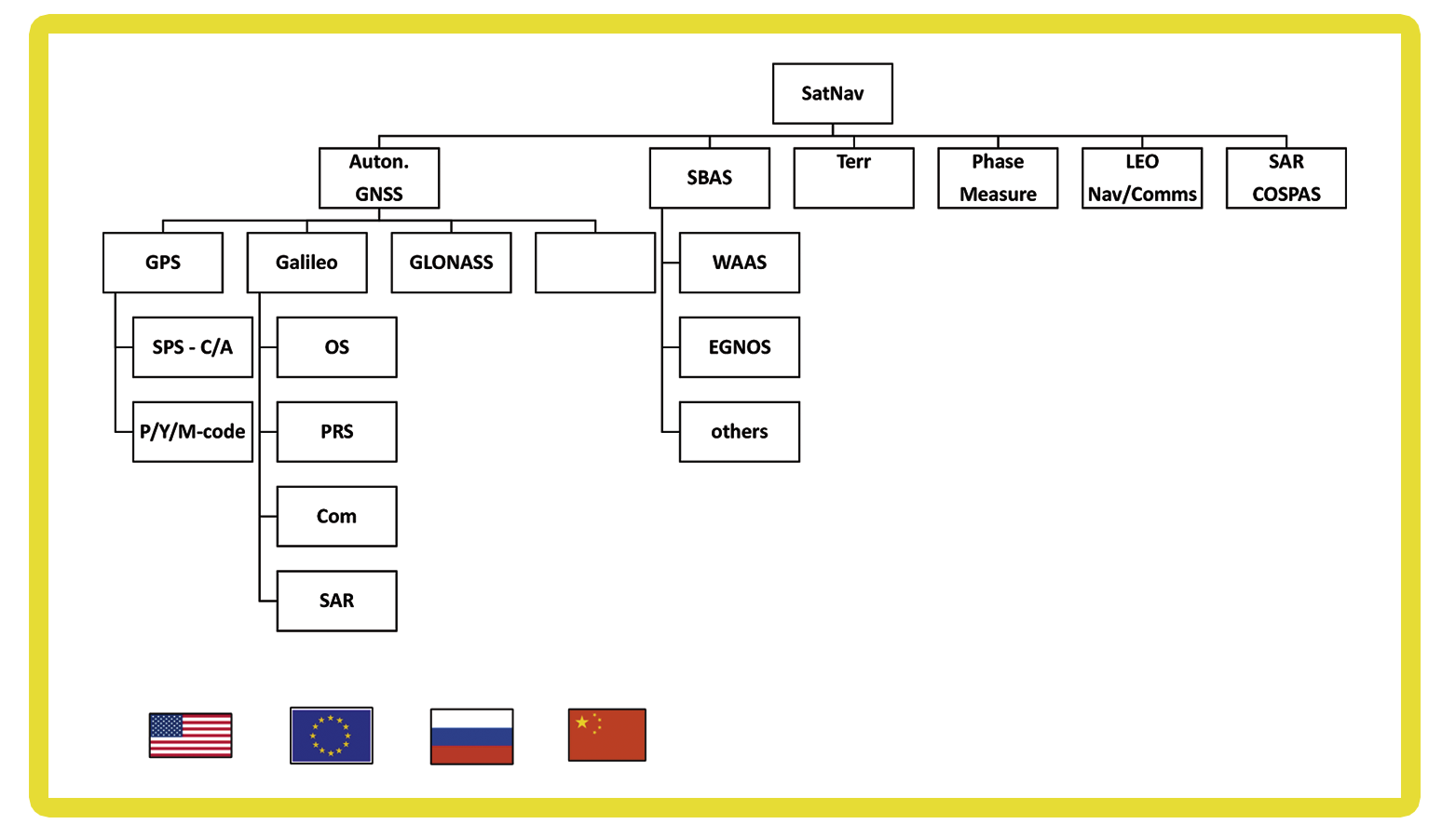
Die vier großen und global autonom funktionierenden Satellitennavigationssysteme GPS, GLONASS, BEIDOU und Galileo werden als Global Navigation Satellite Systems (GNSS) bezeichnet. Die primären Gründe für den Erfolgslauf von GNSS sind die weltweite Einsetzbarkeit und globale Abdeckung, leichte Nutzung und Handhabung bzw. relativ einfache Berechnung der Position, hohe Genauigkeit und zumindest für den einfachen Nutzer ein Gratisdienst beim Zugriff auf das offene bzw. freie Signal.
Neben diesen vier autonomen GNSS existieren eine Reihe von komplexeren Derivat-Anwendungen, von denen insbesondere die satellitengestützten Space Based Augmentation Systems (SBAS) oder erdgebundenen Ergänzungssysteme Differential Global Positioning System (DGPS), Erwähnung finden sollten (siehe Abb. 1). Von diesen „GNSS-Augmentation Systems“ ist speziell das European Geostationary Navigation Overlay Service (EGNOS) hervorzuheben, das für den europäischen Raum das Korrektursignal und damit eine höhere Genauigkeit und Sicherheit liefert. Weitere Spezialanwendungen (siehe Abb. 1) im Bereich Satellitennavigation sind die Verortung durch niedrigstehende Kommunikationssatelliten Low Earth Orbit (LEO), komplexere Messverfahren für hohe Genauigkeit (Phase Measure) und das Notsignalservice Search and Rescue (SAR) COSPAS.
Satellitennavigation - allgemein
Die Komponenten eines Satellitennavigationssystems werden allgemein in drei Hauptgruppen unterteilt:
- Nutzersegment;
- Weltraumsegment;
- Bodensegment.
Das Zusammenwirken dieser drei Komponenten wird in Abbildung 2 visualisiert. Der Nutzer (Nutzersegment) im Zentrum empfängt das spezielle Satellitensignal, um damit die genaue Position berechnen zu können. Das Weltraumsegment beinhaltet die Satelliten im Orbit, die durch diverse Bodenstationen gesteuert und überwacht werden. Neben diesen Steuerungs- und Überwachungseinrichtungen zählen verschiedene weitere Zentralen und Kommanden zum Bodensegment. Ziel und Zweck dieser Bodenstationen ist es primär, die Satelliten präzise im Orbit zu halten und permanent ein möglichst präzises Signal in Space (SiS) sicherzustellen.
Nutzersegment
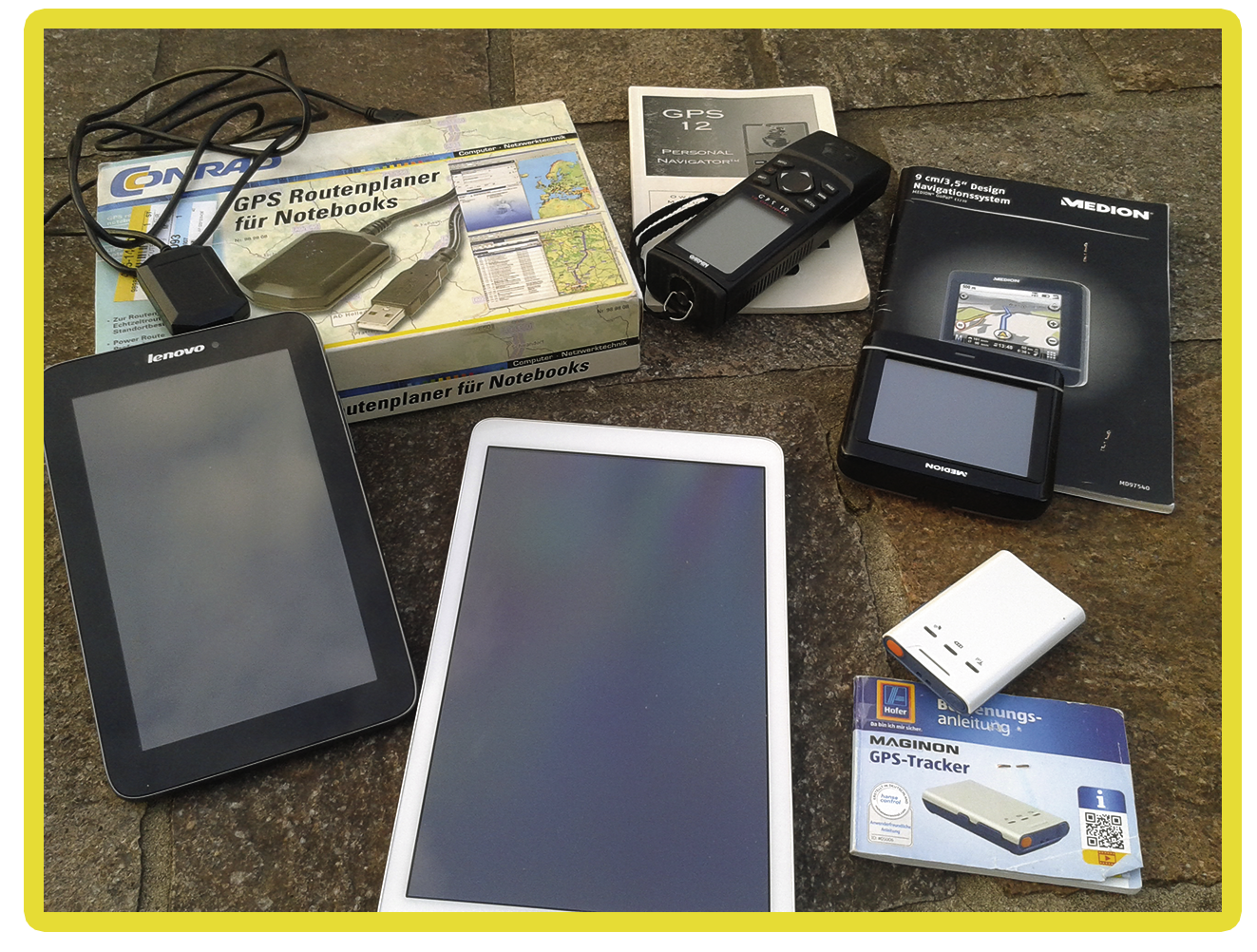
Das Nutzersegment für Satellitennavigation bzw. PNT-Dienste (Position Navigation Timing) ist primär der „GNSS-Chip“, der in unterschiedliche IT-Komponenten eingebaut wird und konkret die Positionsberechnung durchführt. Abhängig von seiner Bauart werden GPS-, GLONASS-, BEIDOU-, Galileo-Signale, oder eine Kombination davon, für die Berechnung verwendet. Ebenso wie in den hochkomplexen Plattformen wie Abfangjägern und Hubschraubern, sind auch in allen autonomen Drohnen diese GPS-Chips bzw. allgemeiner formuliert, GNSS-Chips eingebaut. Aber nicht nur in der modernen Avionik existiert eine hohe Durchdringung mit den GNSS-Chips in den Systemen. Fast alle militärisch einsatzrelevanten Bodensysteme wie Gefechtsfahrzeuge, alle modernen Kommunikationssysteme bzw. Funkgeräte haben ebenfalls GNSS- Chips in ihren IT-Systemen integriert und benützen GNSS für die genaue Position und/oder den Zeitstempel. In der Zivilgesellschaft sind die GNSS-Chips u. a. für den Massenmarkt in diversen „low-end“-Produkten eingebaut (siehe Abb. 3). Die Spannweite reicht von Smartphones über Tablets zu den speziellen Trackern bis hin zu den diversen Navigationssystemen. Von den Vorzügen dieser GNSS-Chips (globale Raumabdeckung, einfache Bedienung, hohe Genauigkeit, kostengünstig bzw. gratis) hat sich sicher fast jeder Leser durch unterschiedliche private Anwendungen und Applikationen schon mehrfach selbst überzeugen können. Diese Vorzüge treffen natürlich auch auf die militärischen Anwendungen zu, wobei die Verfügbarkeit des Signales (Availability) und die Integrität (Integrity) gesondert zu prüfen bzw. zu analysieren sind.
Weltraumsegment
Das Weltraumsegment ist der öffentlichkeitswirksamste Teil eines GNSS, und die Satellitenstarts werden daher dementsprechend medial aufbereitet. Derzeit wird im Almanach mit Stand August 2018 folgende Anzahl von GNSS-Satelliten geführt:
Unterschieden wird zwischen:
- LEO (Low Earth Orbit)
- MEO (Medium Earth Orbit) und
- GEO (Geostationary Orbit) Flugbahn.
Grundsätzlich befinden sich alle GNSS-Satelliten im sogenannten MEO-Orbit (für GPS ungefähr 20 200 km und für Galileo 23 200 km). Dieser MEO-Orbit ist die optimale Lösung gemäß dem Einsatzkonzept für GNSS und der Anzahl an Satelliten, die für eine globale Abdeckung benötigt werden. Die LEO-Kommunikationssatelliten fliegen in nur wenigen hundert Kilometern Höhe, während die Korrektursignale der SBAS von Geostationary Orbit ausgestrahlt werden.
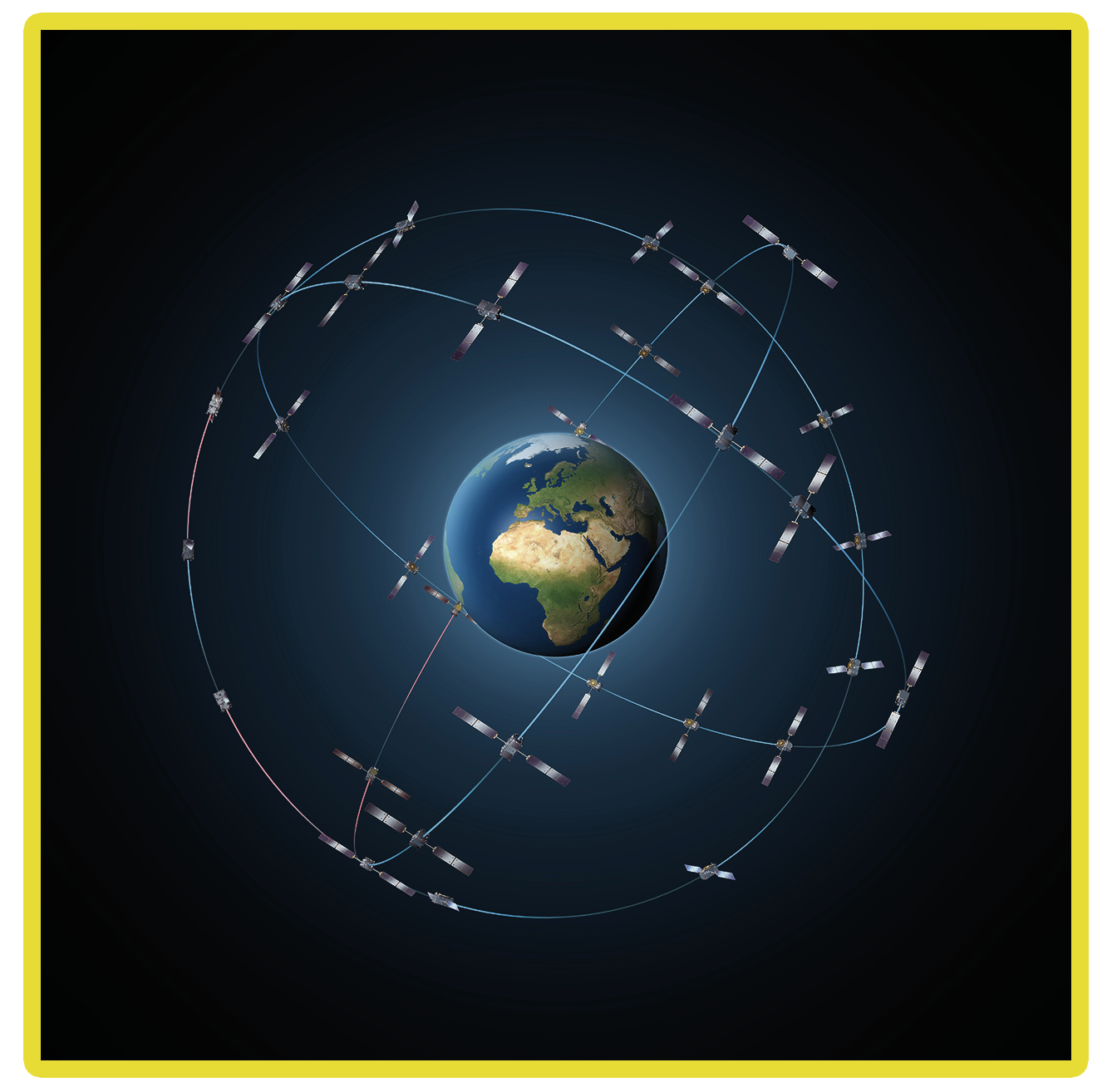
Die Satelliten der vier GNSS sind in mehreren Bahnen angeordnet, um eine möglichst optimale Abdeckung der Erdkugel zu gewährleisten (für Galileo z. B. in drei Bahnen mit einem 56 Grad Winkel zum Äquator), damit zumindest immer vier Satelliten von jedem Punkt der Erde „gesehen“ werden (line of sight), wie in Abbildung 4 dargestellt.
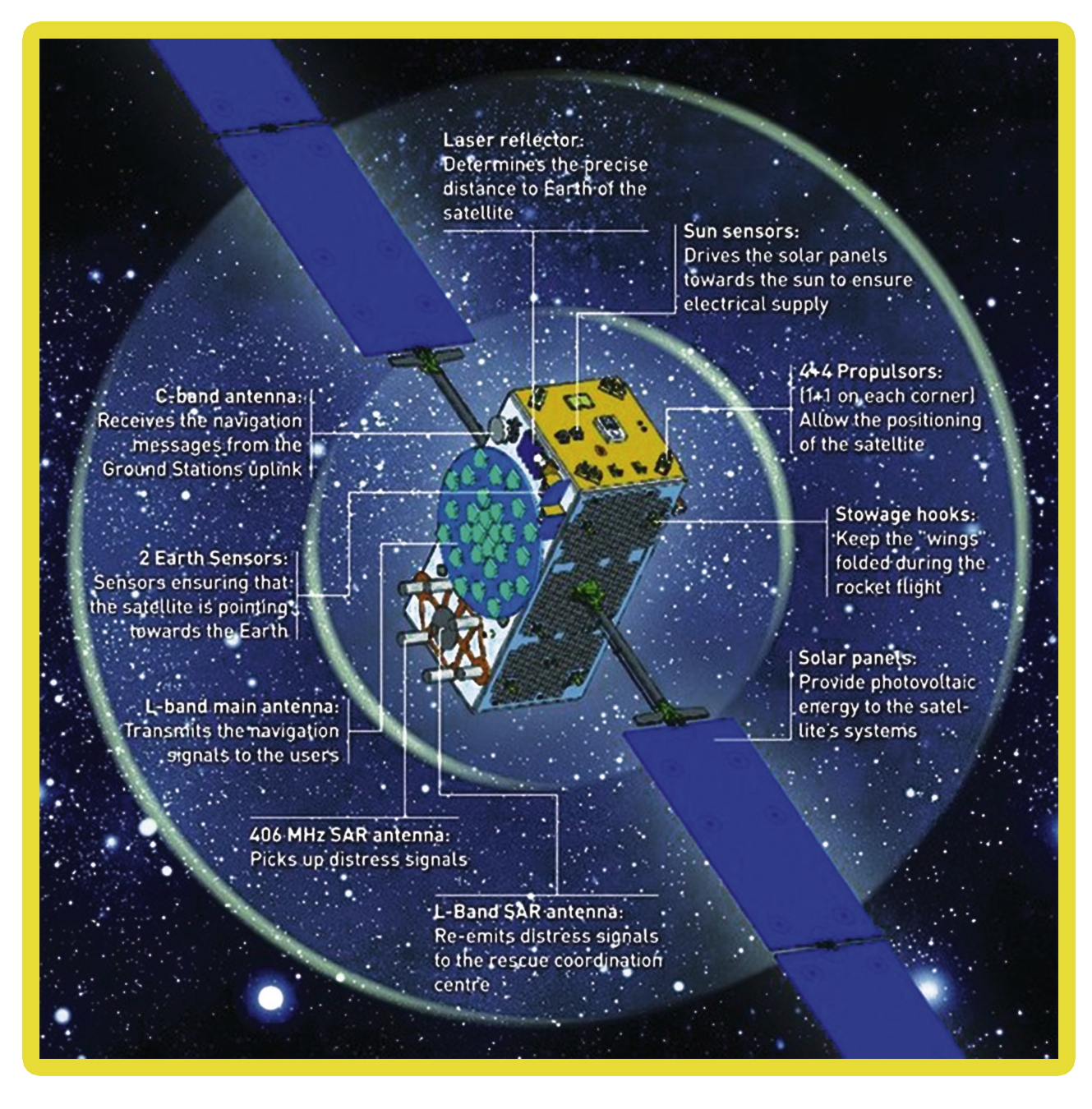
Die wichtigste Komponente aller Satelliten ist die „payload“, d. h. die eigentliche Existenzberechtigung. Bei den GNSS-Satelliten sind es die genauen Atomuhren, verbunden mit dem Frequenz- und Signalgenerator sowie den Sendeantennen (siehe Abb. 5). In dieser Abbildung ist die massive L-Band-Antenne zur Ausstrahlung der Navigationssignale unverkennbar ersichtlich.
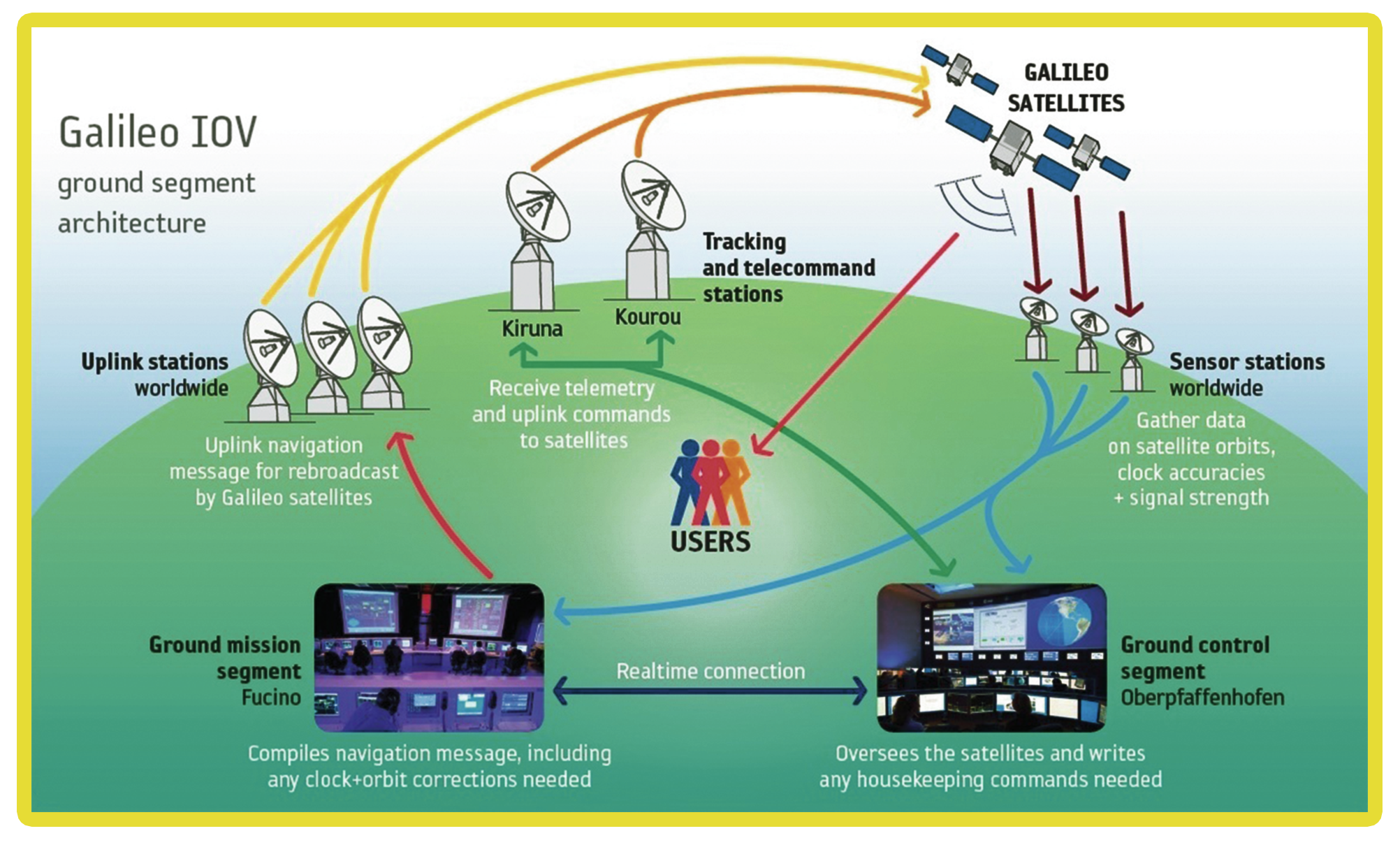
Bodensegment
Das Bodensegment eines GNSS umfasst ein globales Netzwerk mit den Mission Control oder Master Control-Zentren als Herzstück und Telemetry Tracking and Control, Mission Up-Link, Command&Control sowie Monitoring-Stationen (siehe Abb. 6). Für besondere Dienste (z. B. beim verschlüsselten Signal) bzw. für die Downstream-Interaction mit Nutzergruppen oder für spezielle Governance sind weitere Bodenelemente für den erfolgreichen Betrieb aller GNSS-Services notwendig. Durch eine permanente und globale Analyse der ausgestrahlten Satellitensignale, basierend auf der höchstpräzisen Systemzeit sowie einer präzisen Flugbahnverfolgung, werden selbst kleine Abweichungen sofort registriert und geeignete Gegenmaßnahmen in der Flugbahnkorrektur eingeleitet. Dieses hochkomplexe System verlangt eine ausgezeichnete Koordination, gepaart mit Spezialwissen, das aufgrund der hohen Geschwindigkeiten, den weiten Distanzen und der erforderlichen Präzision bis zu den Auswirkungen von Einstein’s Relativitätstheorie reicht.

Positionsbestimmung
Die Positionsberechnung erfolgt nach zwei Prinzipien: Trilateration und Pseudo-Entfernung, in Englisch Pseudo-Range. Wenn die Position und Entfernungen der relevanten Satelliten zum Empfänger bekannt sind, kann der unbekannte Standort durch eine einfache Kugelschnittberechnung eruiert werden. Die konkreten Entfernungen können grundsätzlich aus der Laufzeit der Signale vom Satelliten zum Empfänger berechnet werden: Entfernung ist Geschwindigkeit mal Zeit (im Vakuum Lichtgeschwindigkeit).
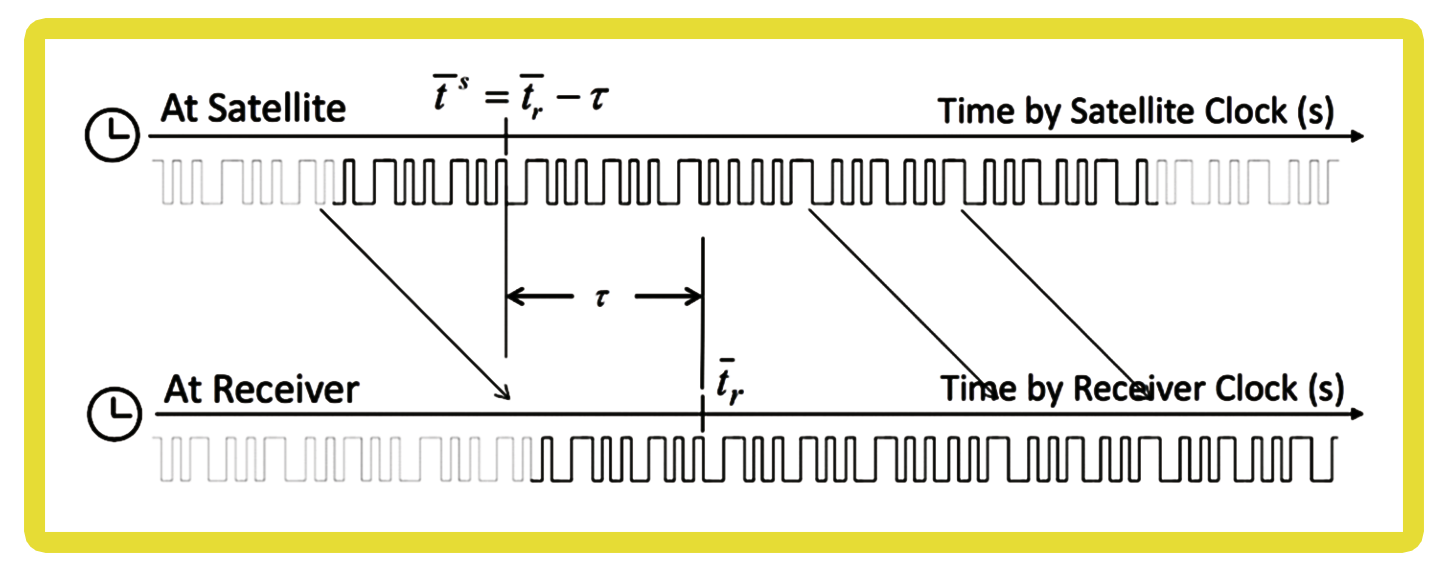
Leider kann insbesondere auf Grund der fehlenden hochgenauen Atomuhren in den Empfängern keine absolute Laufzeitmessung der Signale durchgeführt werden; die Fehlerquelle wäre viel zu hoch für eine brauchbare Positionsbestimmung. Daher wird statt der absoluten Laufzeitmessung mit relativen Zeiten, sprich Pseudo-Range gearbeitet (siehe Abb. 7). Jeder Satellit sendet einen „individuellen“ PRN (Pseudo-Random Noise) Code, der auch im Empfänger „synthetisch“ nachgeneriert wird. Durch den Vergleich im Empfänger zwischen dem vom Satelliten empfangenen Signal und dem nachgebauten Signal (für jeden Satelliten ein zugehöriger Code) gibt sich rechnerisch eine Zeitdifferenz, die zu einer Pseudorange umgelegt werden kann. Für diese Rechenoperation ist jedoch zumindest ein vierter Satellit zur Lösung der mathematischen Gleichung notwendig. Quasi als Nebenprodukt liefert diese Gleichung in Ergänzung zur räumlichen Position die höchstgenaue Satellitenzeit, die vom GNSS-Chip über standardisierte Protokolle weitergegeben wird.
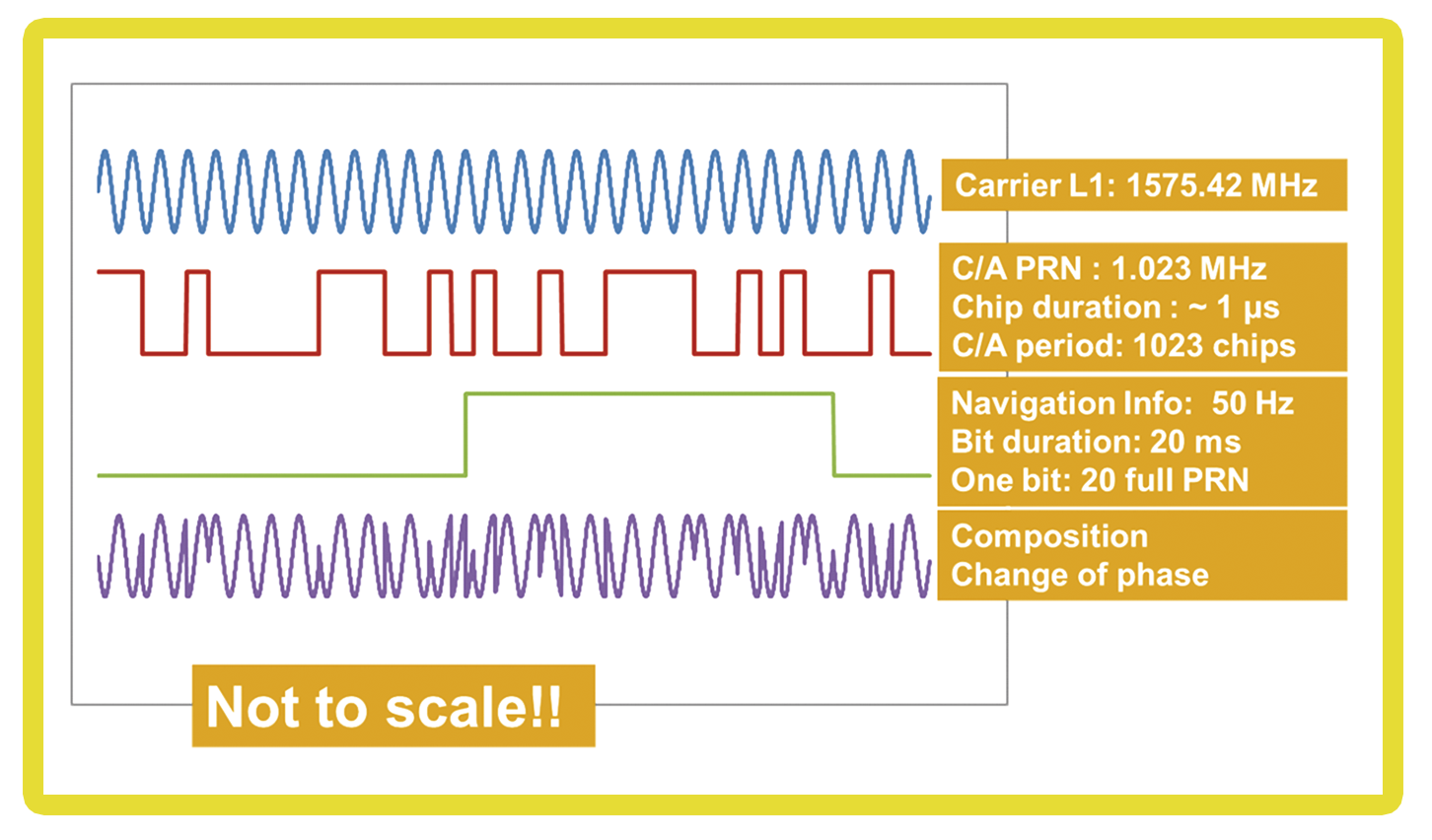
Das Signal in Space (SiS) der GNSS-Satelliten besteht aber nicht nur aus dem PRN-Code, der für die Berechnung der relativen Laufzeit benötigt wird, sondern es benötigt auch die Navigationsinformation. Die Navigationsmessage der GNSS-Satelliten inkludiert insbesondere die Systemzeit, die konkreten Bahndaten der Satelliten, den Status der Satellitenkonstellation, Ionosphären-Daten zur Fehlerkorrektur sowie weitere systemrelevante Informationen. Diese Informationen werden vom Empfänger benötigt, um durch die besprochenen Kugelschnitte die exakte Position des Empfängers berechnen zu können. Sowohl die Laufzeitberechnung als auch der vollständige Empfang aller relevanten Informationen der Navigation Message benötigen eine gewisse Zeit. Daher sind GNSS-Empfänger nicht sofort einsatzbereit, sondern benötigen eine gewisse Zeitspanne, die so genannte „Time-To-First-Fix“.
Die bisherigen Ausführungen und Erläuterungen betreffen primär die Basiskonfiguration des GPS. In den vergangenen Jahren wurden parallel zum Siegeszug der Satellitennavigationssysteme drei grundsätzliche Entwicklungen vorangetrieben:
- Multi-Konstellation;
- Verschlüsselte Signale;
- Mehrfach-Frequenzeinsatz (siehe Abb. 9).
Die Multi-Konstellationsentwicklung vom GPS zu den vier autonomen GPS, GLONASS, BEIDOU und Galileo (siehe Abb 1) ermöglicht, neben den speziellen Aspekten für Industrie, Forschung, wirtschaftlichen Autarkie und Governance, für den Nutzer die Möglichkeit zur Auswahl. Basierend auf einer Reihe von Entscheidungskriterien können Nutzer bzw. PNT-Services einer speziellen GNSS-Konstellation den Vorzug geben oder durch den Einsatz von kombinierten Empfängern auf eine viel größere Anzahl von Satelliten zugreifen und im Prinzip damit eine bessere/genauere Positionsbestimmung ermöglichen.
Zur Erhöhung der Sicherheit (z. B. gegen Spoofing-Attacken) wurde schon das GPS mit offenen und verschlüsselten PNT-Signalen ausgestattet. Diese Praxis setzte sich auch bei GLONASS, BEIDOU und Galileo fort. Der EU GNSS-Galileo-Dienst ist für vier unterschiedliche Services ausgelegt:
- Open Service (OS);
- High Accuracy Service (HAS);
- Public Regulated Service (PRS): verschlüsseltes Signal;
- Search and Rescue Service (SAR - siehe auch Abbildung 1).
Der PRS-Dienst mit dem verschlüsselten Signal ist aufgrund der Konzeption des SiS um vieles robuster als das offene Signal und daher besser geeignet, sichere PNT-Dienste zu liefern. Sowohl GPS als auch Galileo sind damit für die elektronischen Kampfbedingungen (EloKa-Bedingungen) des 21. Jahrhunderts prädestiniert.
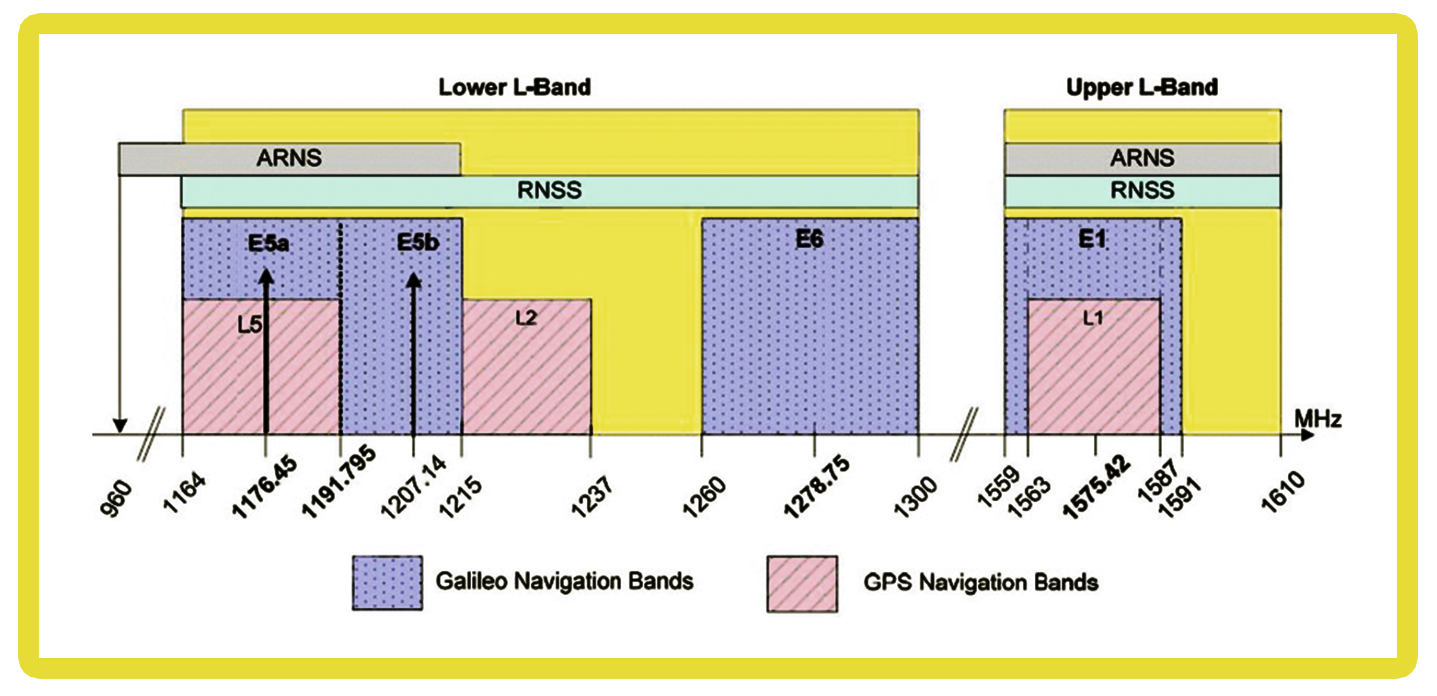
Die dritte Weiterentwicklung ist die zusätzliche Nutzung von weiteren zivilen und verschlüsselten Signalen auf anderer Bandbreite (siehe Abb. 9). Diese zusätzlichen Signale auf anderen Frequenzen erhöhen einerseits die Sicherheit des Systems gegen Störangriffe, erlauben aber gleichzeitig auch eine höhere Genauigkeit durch zusätzliche Korrekturberechnungen.
Die aktuellen Weiterentwicklungen in der Satellitennavigation, insbesondere Multi-Konstellation, Mehrfach-Frequenzen und verschlüsselte Signale, werden durch den hohen Durchdringungsgrad von GNSS sowohl in der Zivilgesellschaft als auch beim Militär vorangetrieben. Diese technischen Entwicklungen sind als Gegenmaßnahme gegen moderne EloKa-Bedrohungen notwendig, erlauben aber dem Nutzer ein großes Angebot von weltraumgestützten PNT-Services mit diversen Abstufungen in
- Sicherheit (Verfügbarkeit, Integrität),
- Kosten/Nutzen bzw.
- Genauigkeit.
wird fortgesetzt
Brigadier Mag. Dr. Friedrich Teichmann, MSc MAS ist Leiter des Institutes für militärisches Geowesen.











